














 54 / 61
54 / 61

53
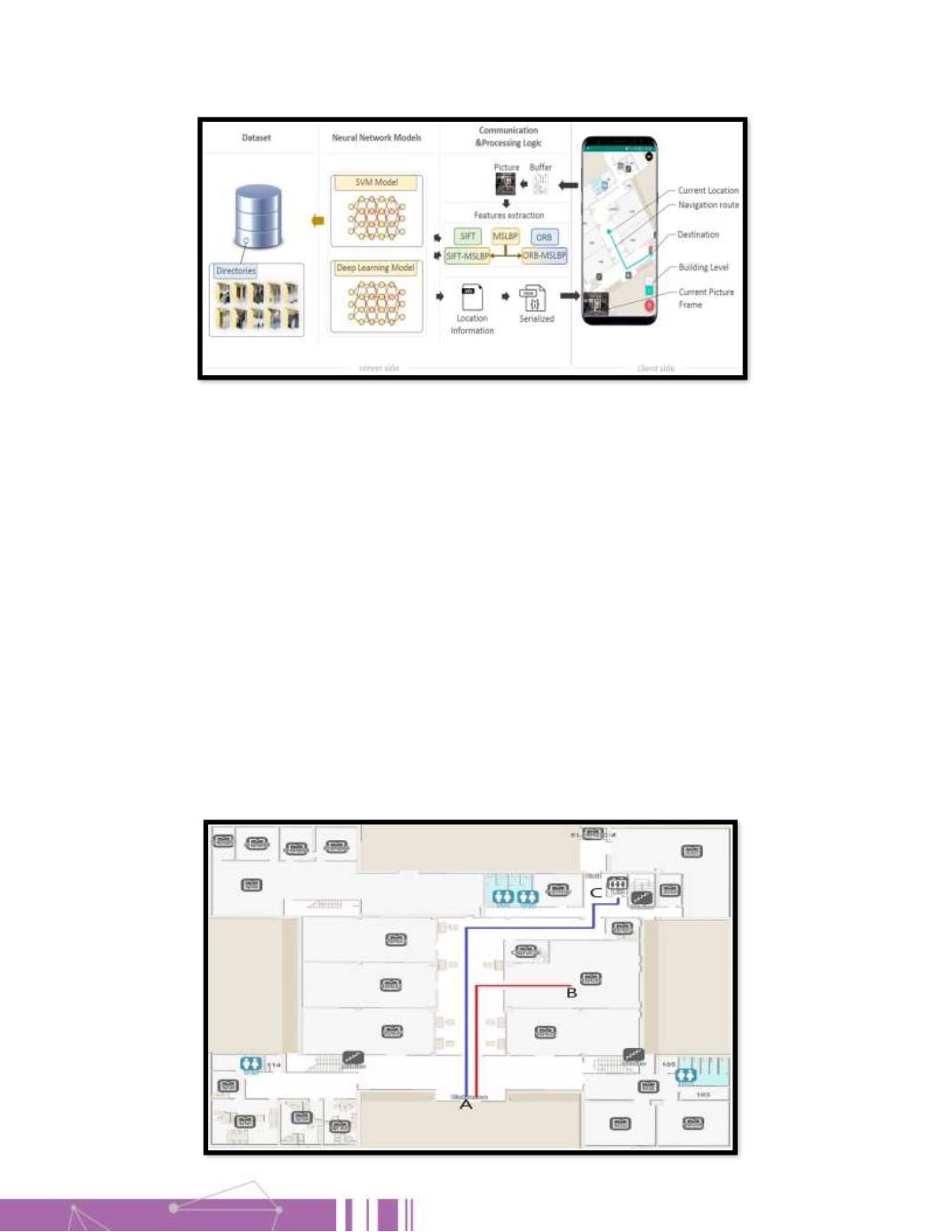
Figure 2: Floor Plan for
Building B09
Environment. The evaluation experiments were carried out
on the ground floor of the ‘B09’ building of Qatar University.
Figure 2 illustrates the floor plan of the building ‘B09’ (ground
floor). Ten people were involved in the testing including 8
females and 2 males to evaluate the navigation systems in
real-time. The blindfolded participants were asked to walk
from the entrance door of the B09 building to two specific
points of interest in the B09 building. Each participant has to
walk from point A to B (Red line in the floor plan, distance =
30 meters) and A to C (Blue line in the floor plan, distance =
47 meters) using the three navigation systems separately.
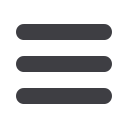
A service to perform scene recognition in the real-time
environment has been created to analyze the performance
of the trained deep learning model. The service is
responsible for receiving query images sent by users and
classifying them to predict their location. The deep learning
model achieved 96.9 % success rate.
References
1.
L. Deng, “Expanding the scope of signal
processing,” IEEE Signal Processing Mag., vol.
25, no. 3, pp. 2–4, May 2008.
2.
G. Hinton, S. Osindero, and Y. Teh, “A fast
learning algorithm for deep belief nets,” Neural
Comput., vol. 18, pp. 1527–1554, 2006.
3.
Yu, Dong, and Li Deng. "Deep learning and its
applications to signal and information processing
[exploratory dsp]." IEEE Signal Processing
Magazine 28, no. 1 (2010): 145-154.s
Figure 6:
System Overview